Google Lunar XPRIZEに挑戦する民間月面探査チーム「HAKUTO」 中間賞獲得に必要な試験を全て完了、結果は2015年1月26日発表
企業動向
2014年12月22日 14:30Googleによる賞金総額3,000万ドルの国際宇宙開発レース「Google Lunar XPRIZE」(以下 GLXP)に挑戦する株式会社ispace(東京オフィス:東京都港区麻布台)が運営する日本初の民間月面探査チーム「HAKUTO(以下 ハクト)」は、ファイナリストとしてノミネートされている中間賞の獲得に必要な各種試験を終了し、GLXPに報告書を提出しました。結果は、審判団による報告書レビューののち、2015年1月26日に行われる米国(California Academy of Sciences - San Francisco, CA)でのセレモニーにて発表されます。
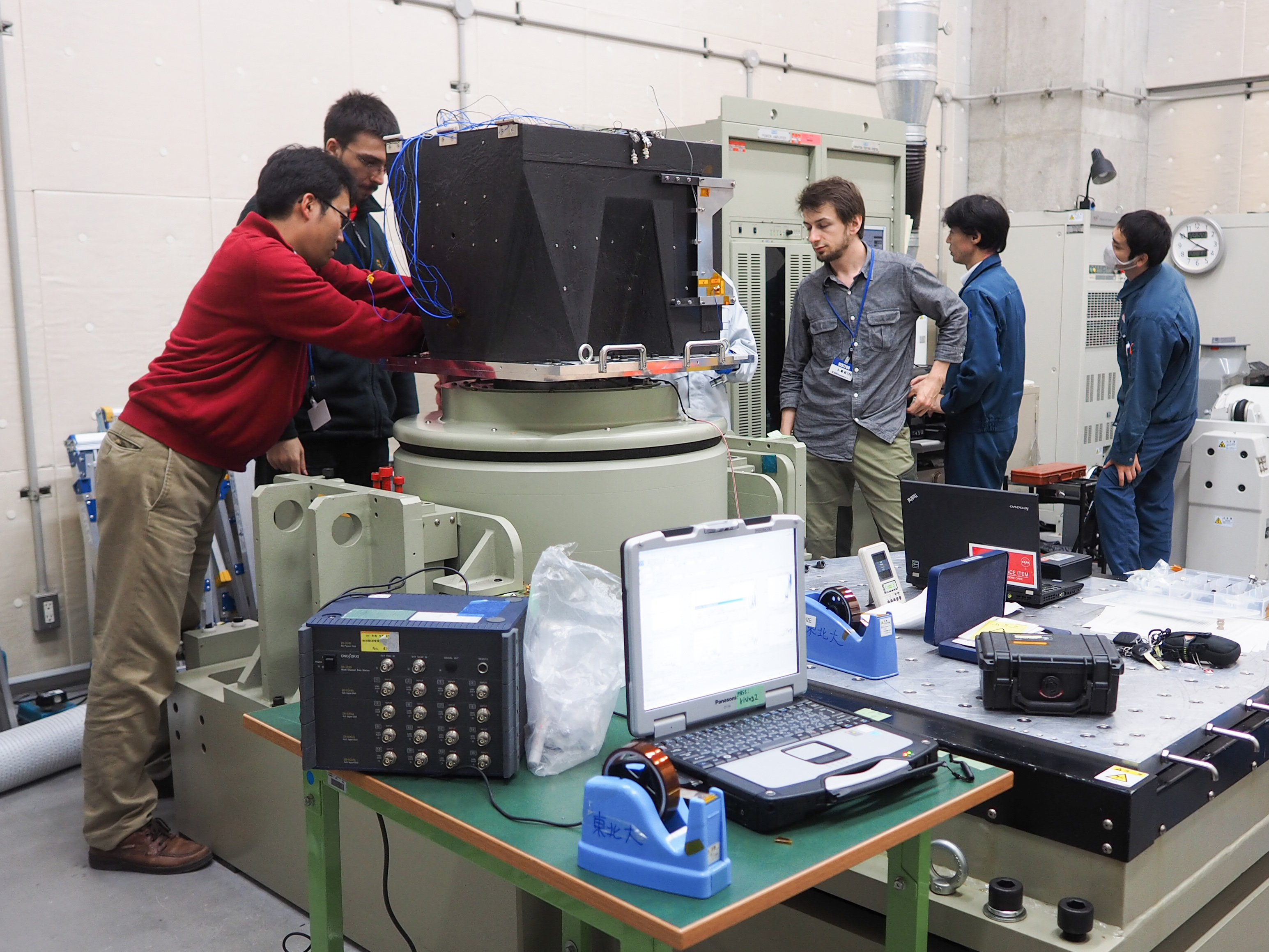
 振動試験の様子
振動試験の様子「ハクト」: http://team-hakuto.jp/
【中間賞獲得に向けた試験】
「ハクト」は、月面探査ローバーのプレフライトモデル、「Moonraker」と「Tetris」が打ち上げ可能(Flight-Ready)な宇宙機として機能することを証明するために、各種試験を行ってまいりました。
■振動試験
ローバーは打ち上げ時に、ロケットの振動により大きな振動が加わります。加振機を用いて、直交3軸に想定される振動を与え、振動環境中でもローバーに異常がないこと、また振動環境を経たあとも性能を損ねること無く正常に起動することを確認しました。
振動試験の様子
http://www.atpress.ne.jp/releases/55440/img_55440_1.jpg
■熱真空試験
宇宙空間及び月面は、地上と違い、ローバーは極低温/高温かつ真空状態に晒されます。大気中とは異なる伝熱特性の中、ローバー内の温度が規定温度範囲内に維持でき、熱真空環境下で所定の性能を満たすことを確認するために、月面までのクルージングフェーズでの環境及び月面での温度環境に近い状態を真空チャンバ内で再現し実験を行いました。今回の実験を通して、宇宙環境でもローバーが正常に稼働することを確認するとともに、ローバーの熱モデル作成のための有益な数値データを取得することに成功しました。
熱真空試験の様子
http://www.atpress.ne.jp/releases/55440/img_55440_2.jpg
■フィールド走行試験
月面は、レゴリスと呼ばれるパウダー状の砂で覆われています。この非常に軟らかい表面や、さまざまな障害物があるなかでもミッションを実行する能力があることを実証するため、GLXP審査員の立ち会いのもと、フィールド走行試験を行いました。実験の開催地は、月面探査ローバーのテストフィールドとして国内最適地であると知られている中田島砂丘を選択しました。中田島砂丘は、適度な起伏のある砂で覆われた地形であり、JAXAなども月面探査車の実験を行った実績がある場所です。
(1)Moonraker展開(GLXPミッション)
Envelope(ローバーを格納するケース)の扉が遠隔操作で開き、Moonrakerが動き出すことを確認しました。
(2)Moonraker走行(GLXPミッション)
Moonrakerが、細かい砂で覆われた軟らかい地面を走行する能力があることを確認しました。
(3)小さな障害物(GLXPミッション)
Moonrakerが小さな障害物の上を乗り越える能力があることを証明しました。
(4)大きな障害(GLXPミッション)
Moonrakerが大きな障害物を遠隔操作で回避する能力があることを証明しました。
(5)Tetrisを牽引(ハクトオリジナルミッション)
MoonrakerがTetrisをテザーで繋がれた状態で牽引するデュアルローバーシステムのデモンストレーションを行いました。
(6)縦孔探査(ハクトオリジナルミッション)
「ハクト」は、デュアルローバーによって月面に存在する「縦孔」を探査することを最終的な目的としています。縦孔は月の誕生を理解する鍵になったり、将来人類が長期滞在する基地を設営するための有力候補地でもあります。今回は、月面に存在する縦孔に見立てた崖で、Moonrakerに支えられたTetrisが、崖の下へ降りていくデモンストレーションを行いました。
(7)500m連続走行(GLXPミッション)
Moonrakerが500mを連続して走行する能力があることを証明しました。細かい砂や、障害物のある表面を、約4時間かけて走りきりました。
月面に見立てた砂丘を走行するMoonraker
http://www.atpress.ne.jp/releases/55440/img_55440_3.jpg
MoonrakerとTetrisで縦孔探査を行う
http://www.atpress.ne.jp/releases/55440/img_55440_4.jpg
Moonrakerが取得した360度画像
http://www.atpress.ne.jp/releases/55440/img_55440_5.jpg
また、今回行ったフィールド走行試験についてのレポートは、「ハクト」のウェブサイト( http://team-hakuto.jp )に掲載していきます。
【月面探査ローバーMoonrakerとTetrisについて】
民間でのミッションに適した最小限の機能を搭載する超小型・軽量ローバーを開発しました。宇宙への打上費は重量に比例して上がるため、軽量化が求められ、日本の得意とする小型化思想をふんだんに取り入れています。また、低コスト化のため民生品の部品を多く活用しています。
【「ハクト」について】
「ハクト」は、株式会社ispaceが運営する、日本で唯一GLXPに参加するチームです。東北大学大学院工学研究科航空宇宙工学専攻教授であり、株式会社ispace CTOの吉田 和哉教授を中心とした月面探査ローバーの開発と、チームの広報活動を担当しています。
【Google Lunar XPRIZEについて】
Googleがスポンサーとなり、XPRIZE財団によって運営される、民間組織による月面無人探査を競う総額3,000万ドルの国際賞金レースです。ミッションは、月面に純民間開発の無人探査機を着陸させ、着陸地点から500m以上走行し、指定された高解像度の動画や静止画データを地球に送信すること。1位のチームには賞金2,000万ドル、2位のチームには賞金500万ドルが与えられます。現在、世界各国から18チームが参加しています。
【Google Lunar XPRIZE中間賞について】
2013年11月にXPRIZE財団とGoogleが発表した中間賞は、順調に開発を進めているチームを経済的にサポートし、更なる投資や認知度を上げることを目的としています。そのために、月面ミッション達成で授与される総額3,000万ドルの賞金に加え、総額600万ドルを新たに中間賞として設定しています。中間賞はイメージング、モビリティ、ランダーシステムの3種類があり、「ハクト」は現在、モビリティサブシステム中間賞(走行系)のファイナリストとしてノミネートされています。
すべての画像