2019年度JR東日本管内のBRTにおける バス自動運転の技術実証の実施について
東日本旅客鉄道株式会社(代表取締役社長:深澤 祐二、以下「JR東日本」)が主催するモビリティ変革コンソーシアムにおいて、「JR東日本管内のBRT*におけるバス自動運転の技術実証」を実施します。
JR東日本管内の気仙沼線BRTにおいて、BRT専用道を用いて、車線維持制御実験、速度制御実験、トンネル内走行実験、障害物検知実験、交互通行実験、車内モニタリング実験など、昨年度の技術実証と比較して、より実運用に近い形での技術実証を行います。
1 実験の目的
本年度の技術実証は、JR東日本管内のBRT専用道で大型自動運転バス(日野ブルーリボンシティ)を使用し、実用化を目指す上での自動運転に関する各種技術の検証を行うことを目的とします。

自動運転実験用車両
※ 本実証実験では、自動運転区間においてもドライバーが乗車し、緊急時においてはドライバーが運転を行います。
※ 実際のBRT営業車両と同型の車両となります。
2 実験の概要
JR東日本、先進モビリティ株式会社(代表取締役社長:青木 啓二)、愛知製鋼株式会社(代表取締役社長:藤岡 高広)、SBドライブ株式会社(代表取締役社長 兼 CEO:佐治 友基)、京セラ株式会社(代表取締役社長:谷本 秀夫)、京セラコミュニケーションシステム株式会社(代表取締役社長:黒瀬 善仁)、株式会社ジェイテクト(取締役社長:安形 哲夫)、ソフトバンク株式会社(代表取締役 社長執行役員 兼 CEO:宮内 謙)、日本信号株式会社(代表取締役社長:塚本 英彦)および日本電気株式会社(代表取締役 執行役員社長 兼 CEO:新野 隆)はJR東日本が主催するモビリティ変革コンソーシアムにおいて、「JR東日本管内のBRTにおけるバス自動運転の技術実証」を実施します。
(1)車線維持制御実験および速度制御実験
・BRT専用道上に設置した機器(磁気マーカ)の情報を高感度磁気センサ(MIセンサ)で読み取り、自車位置を高精度に特定することで、GNSS*電波の届かないトンネルを含む専用道上を円滑に走行する実験を行います。
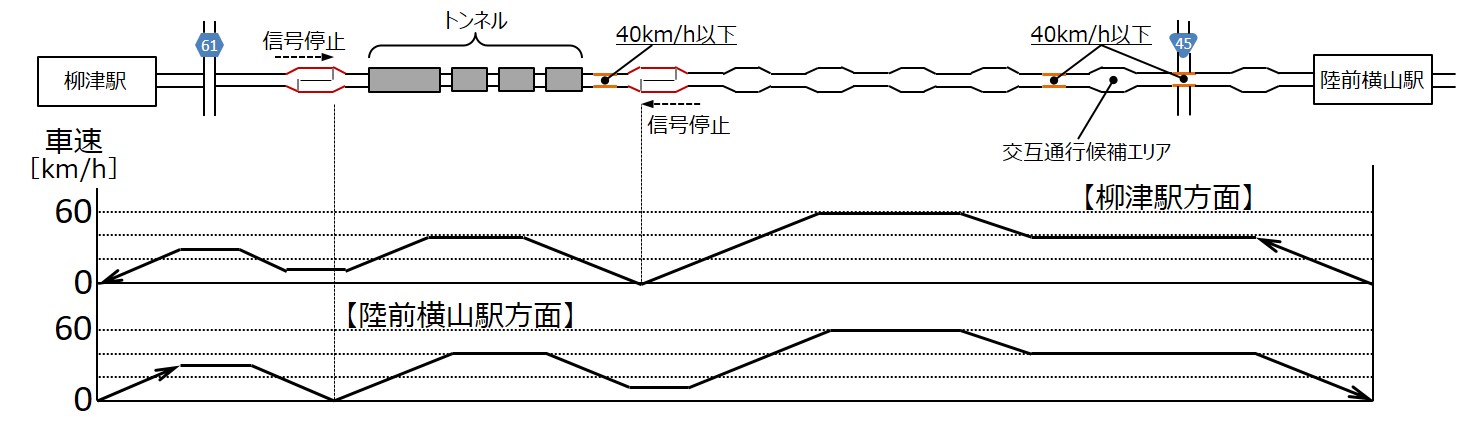
・車両のアクセルとブレーキを自動制御し、柳津駅~陸前横山駅のBRT専用道上を最高60km/hでの走行を目指すとともに、決められた位置でスムーズに停止する実験を行います。
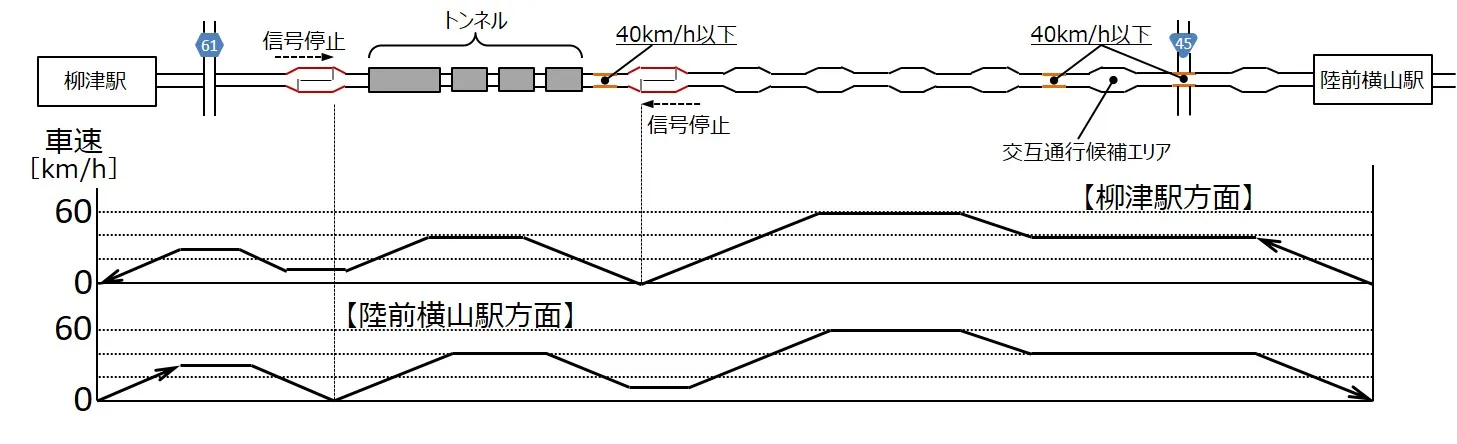
実証実験走行区間における目指す速度イメージ
(2)遠隔監視システムによる車内監視およびお客さまの動向検知の実験
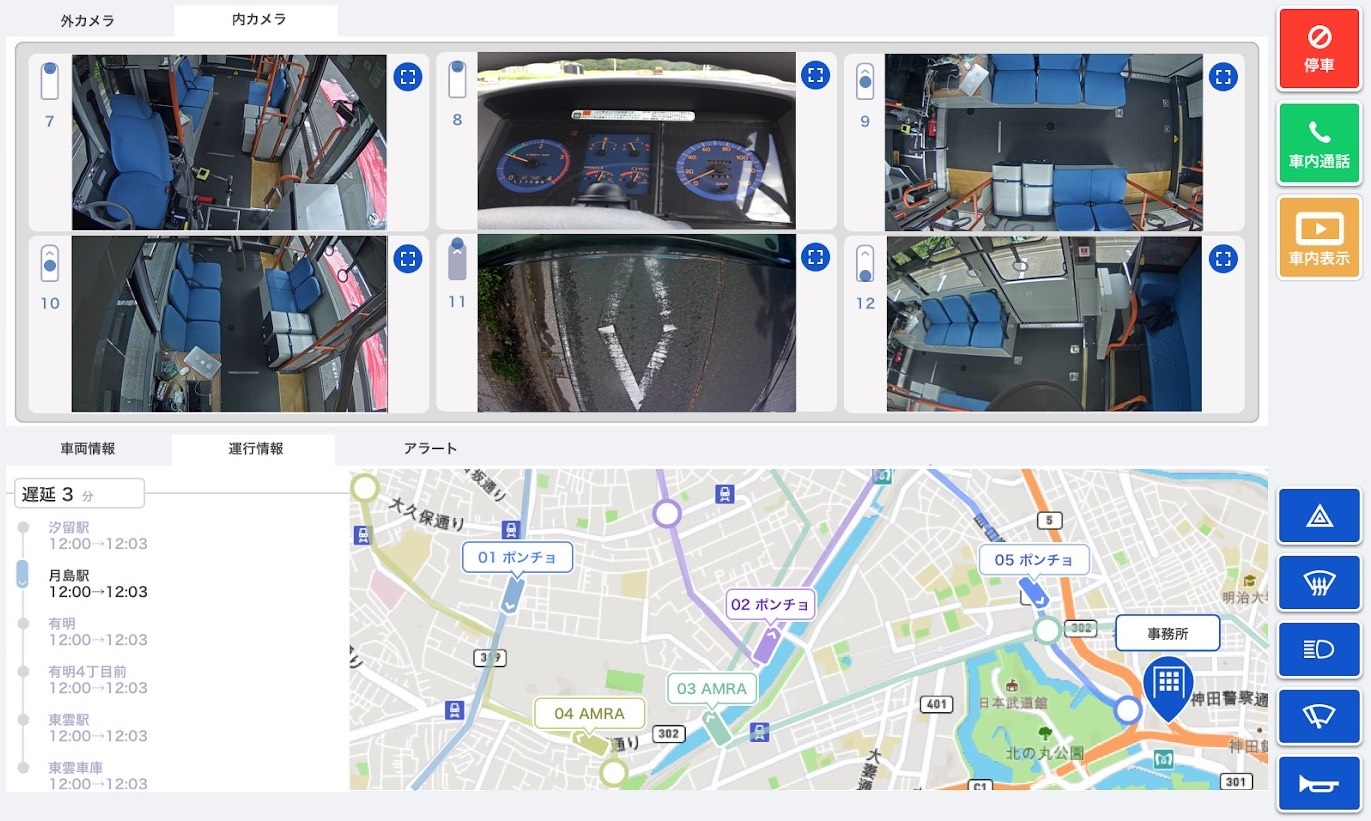
・車内にカメラを設置して、走行中のお客さまの席移動などを人工知能(AI)で検知し、遠隔で走行を監視するオペレーターに自動で通知する実証実験を行います。
・お客さまの転倒などの事故を防止し、自動運転バスに安全に乗車いただくための車内モニタリング機能の有用性を検証します。
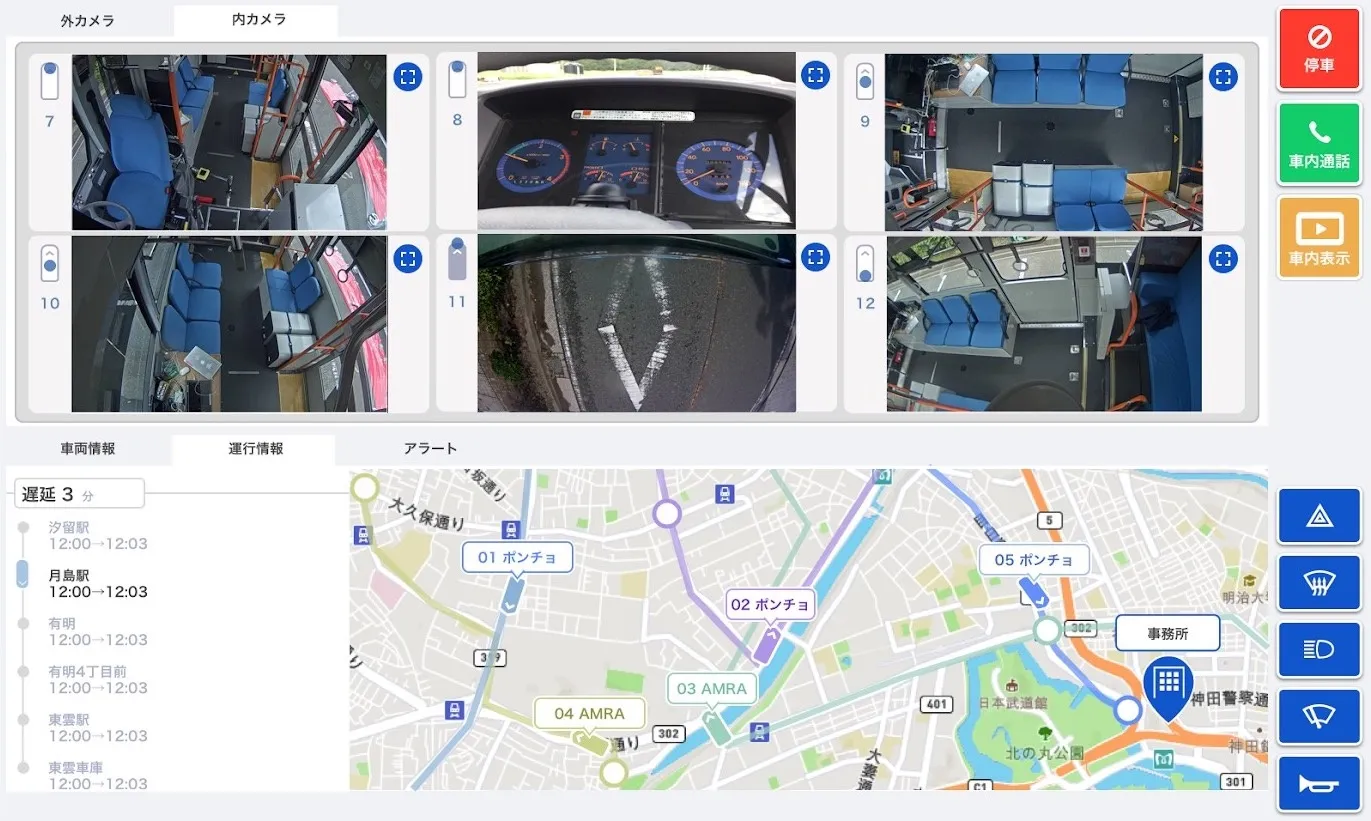
遠隔監視システムのイメージ
(3)無線を用いた信号制御による各種制御実証
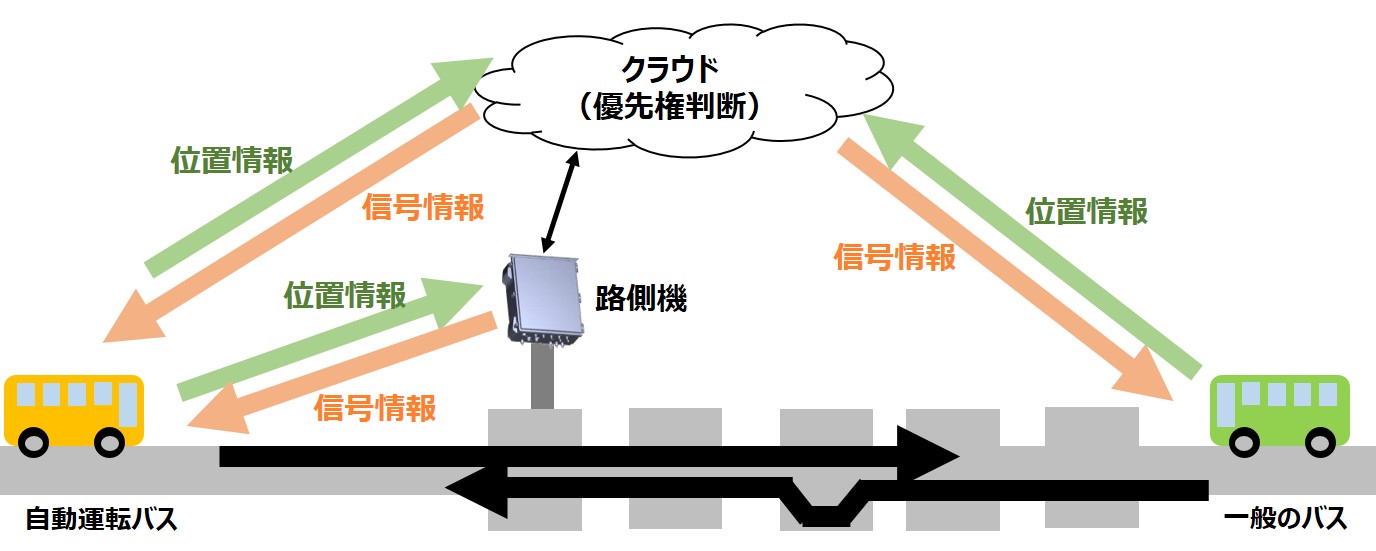
・車両の位置情報を無線通信で取得し、自動運転バスと対向車両の一方に優先権を信号情報として通知し、車両1台分の幅のBRT専用道を交互に通行することを実証します。
・自動運転バスの無線通信は、「700MHz帯ITS無線」「LTE*」「Wi-Fi」を併用し、信頼性を高めます。
・「Wi-Fi」ではマルチホップ伝送*を活用して、トンネル内を含む電波の届きにくい道路沿いにおける自動運転制御の実証を行います。
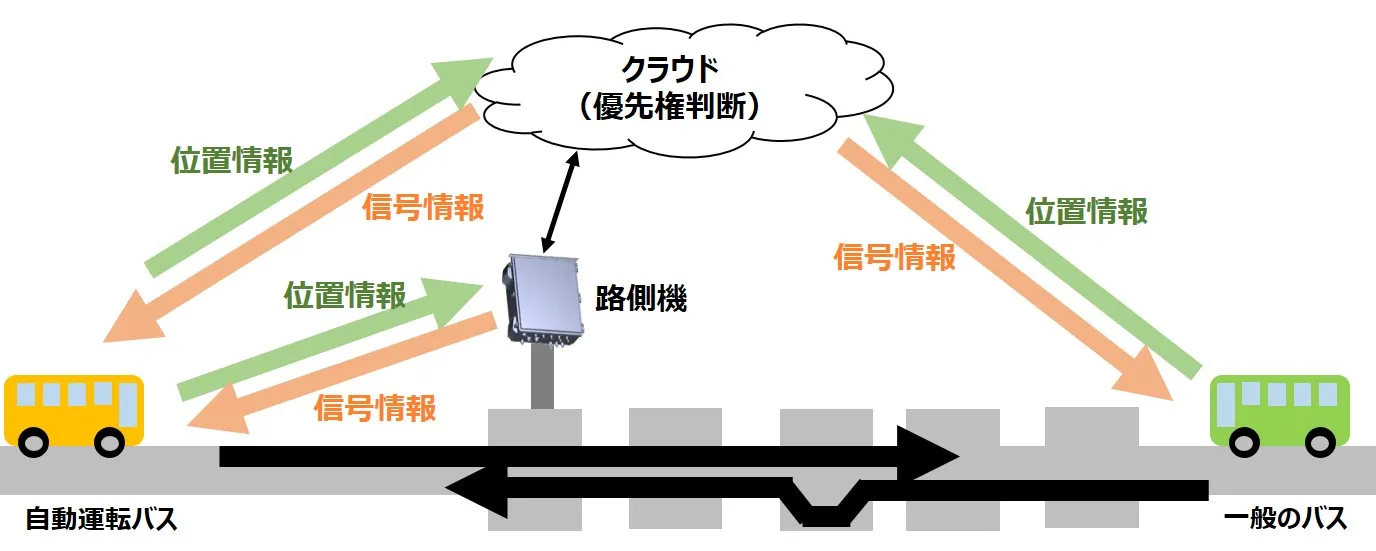
交互通行実験のイメージ
(4)その他
上記のほか、QZSS(みちびき)*などを活用した自動運転バスの測位実験や、専用道に設置した機器による障害物検知実験なども行います。
※実証技術の詳細は【別紙】をご参照下さい。
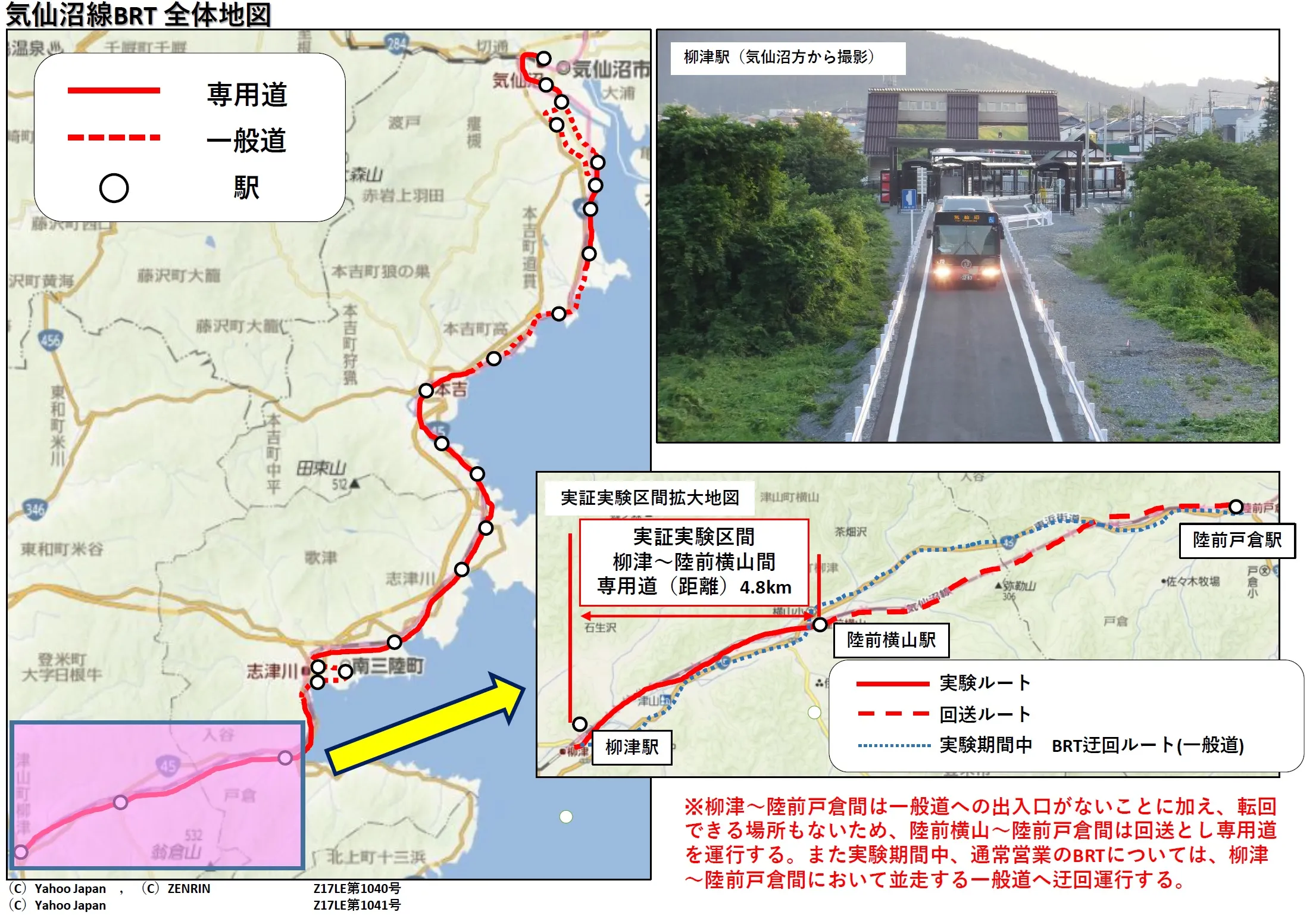
3 実験場所・実証実験期間
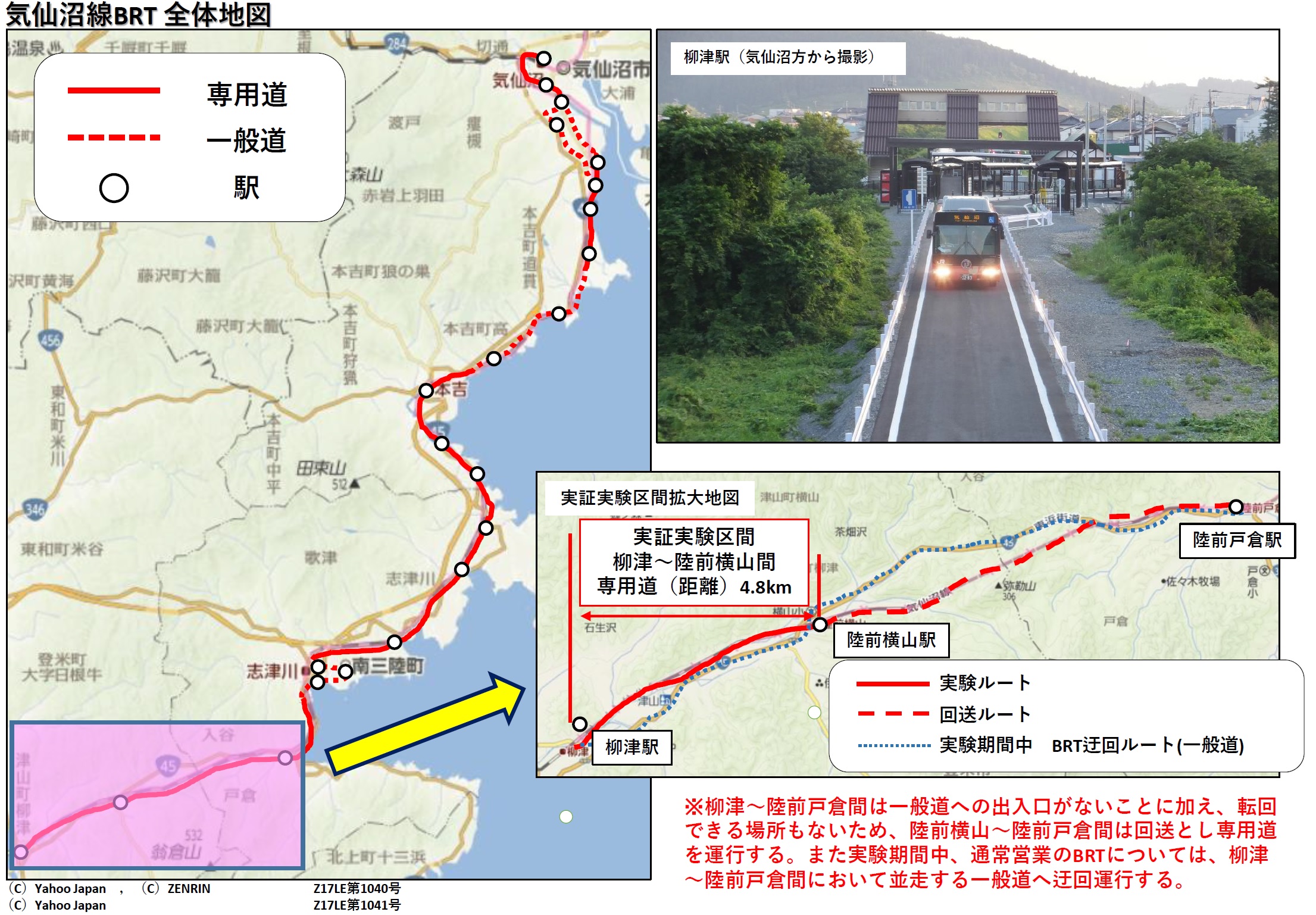
実験場所:気仙沼線BRT柳津駅~陸前横山駅間(宮城県登米市) 4.8km
実証実験予定期間:2019年11月25日(月)~2020年2月14日(金)
※自動運転での走行試験は上記区間でのみ行い、それ以外の専用道および一般道はドライバーが運転します。
4 その他
・今回は技術実証を目的としており、一般の方を対象とした試乗会は開催いたしません。
・2019年11月25日(月)~2020年2月24日(月)の間、気仙沼線BRTは柳津駅~陸前戸倉駅間の専用道を走行せず、一般道へ迂回運行いたします。
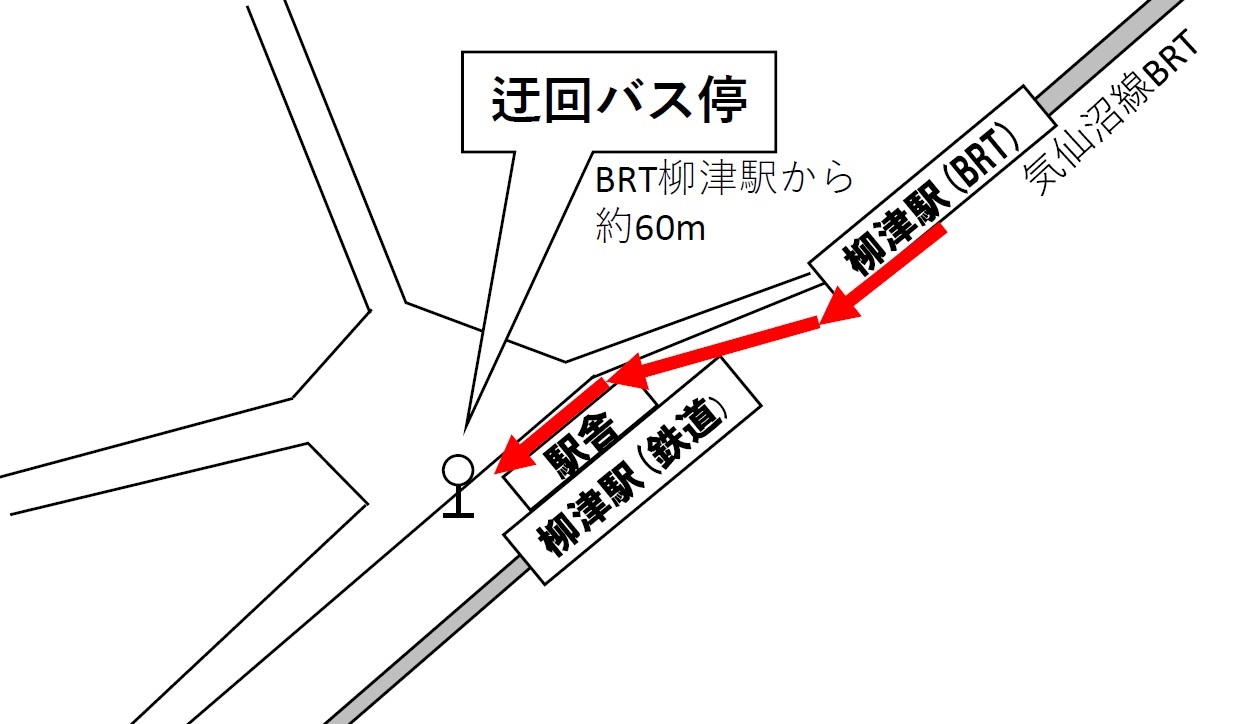
※柳津駅および陸前横山駅のバス停が変わりますのでご注意ください。
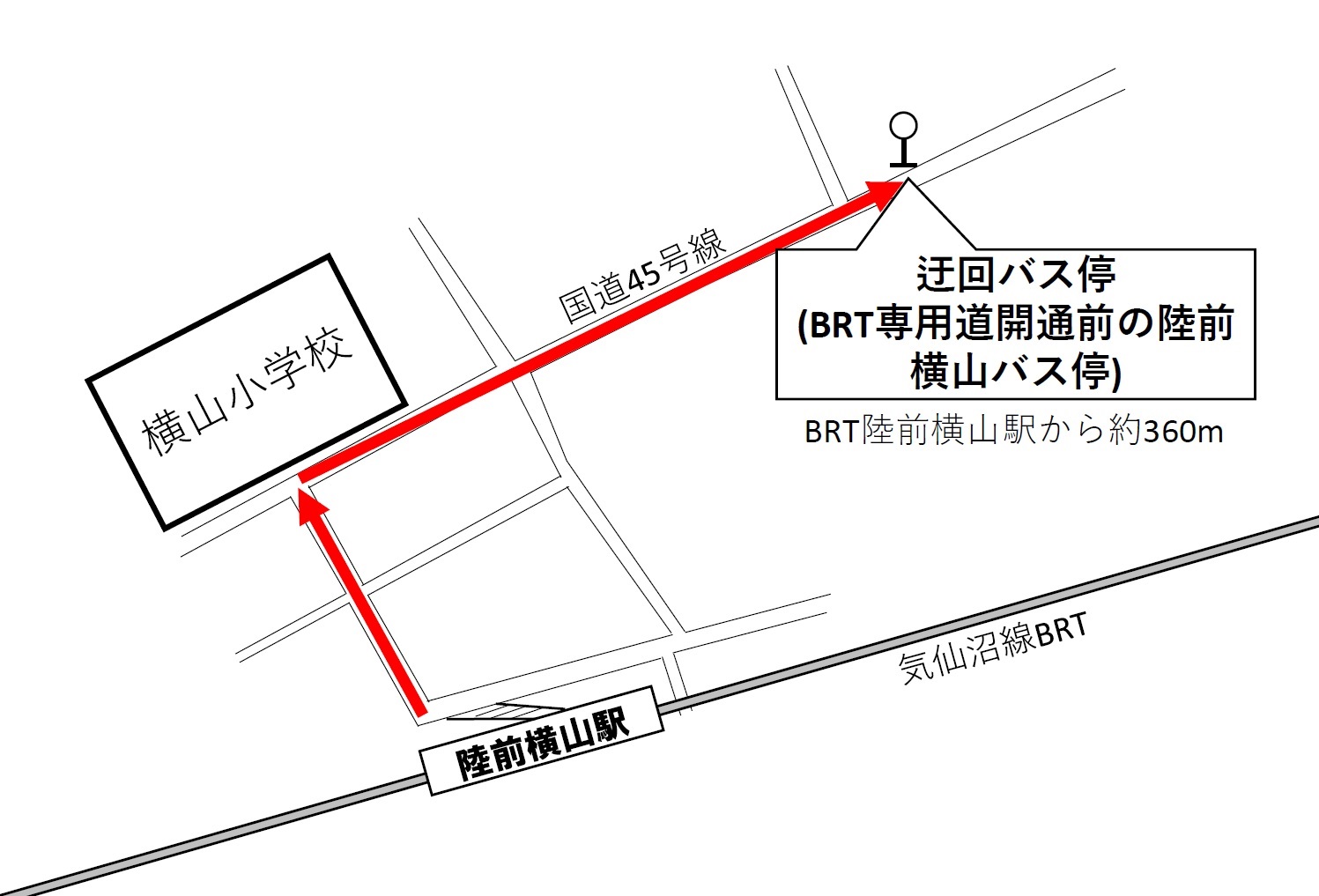
※陸前横山駅のバス停設置は下りのみとなります。柳津方面をご利用の場合は、下りバス停の道路反対側でお待ちください。
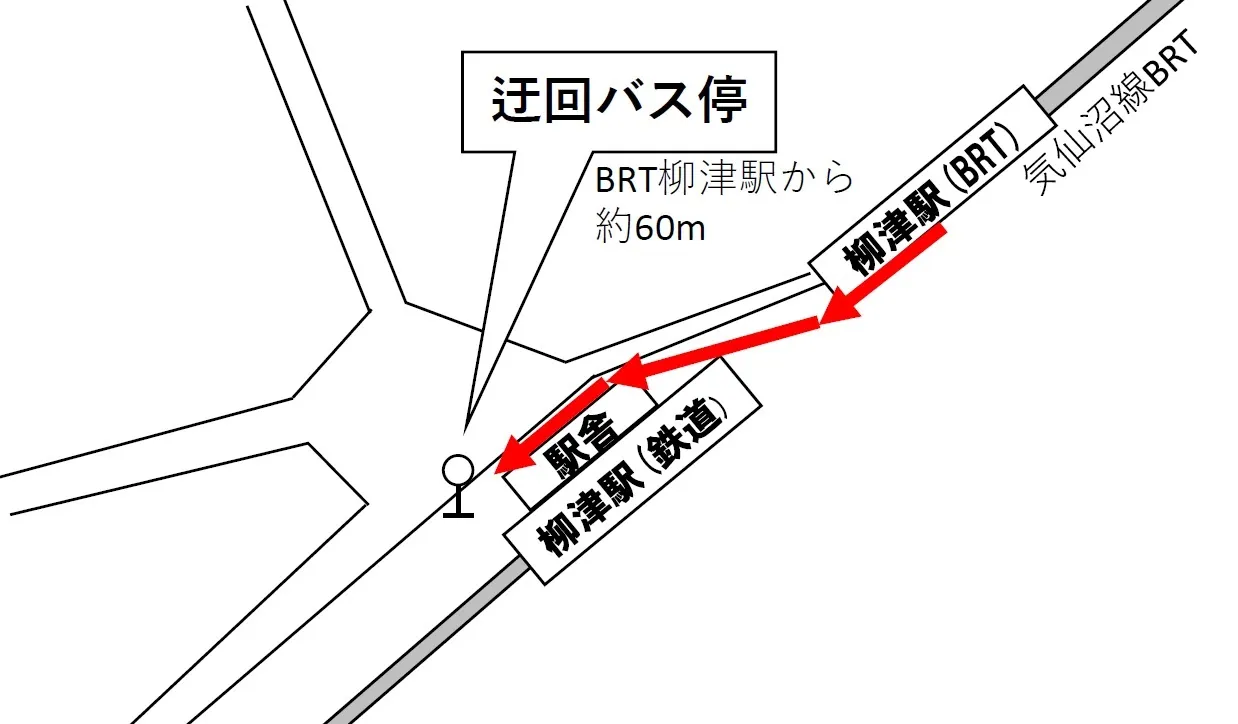
柳津駅 迂回バス停位置図
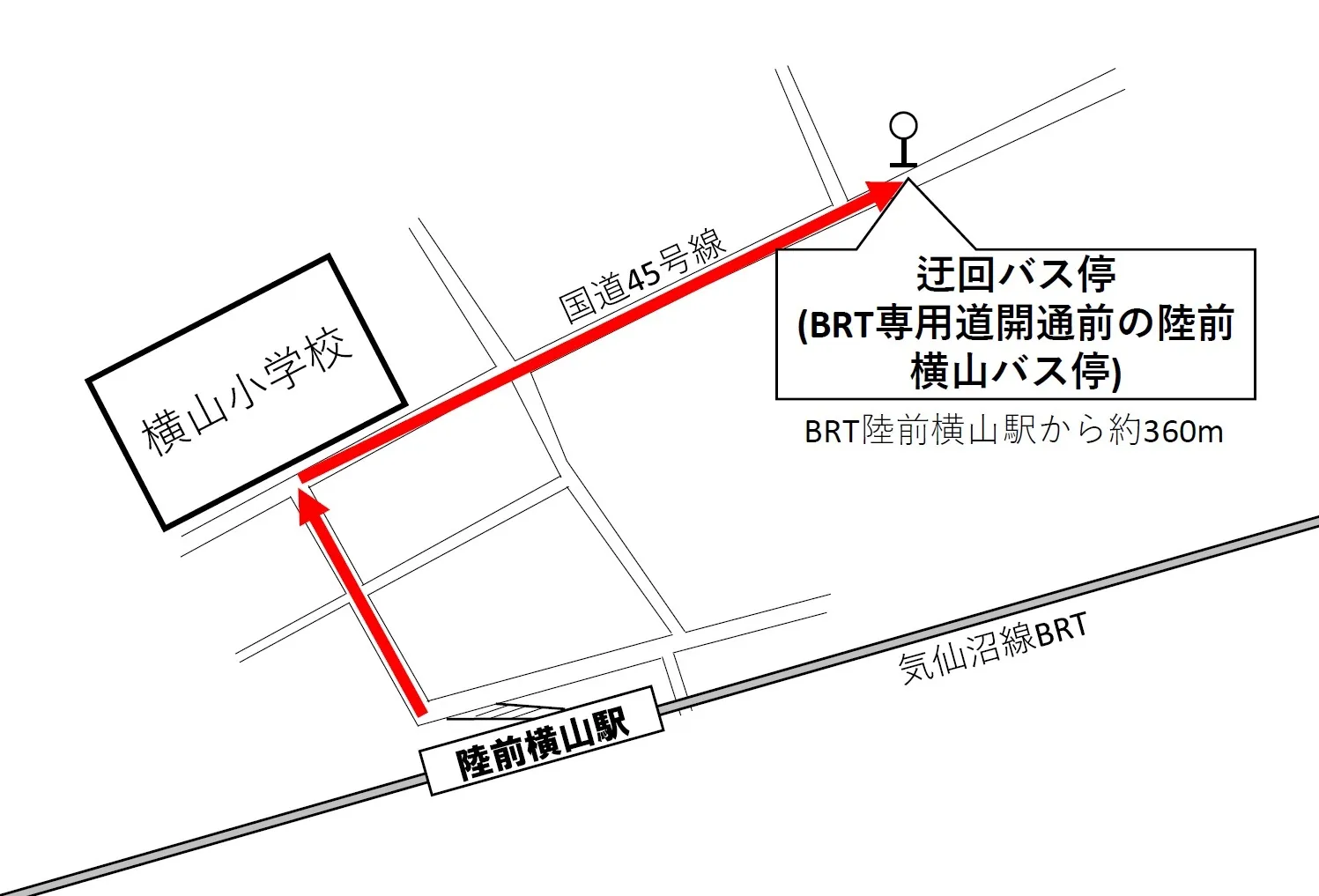
陸前横山駅 迂回バス停位置図
※BRT専用道へは絶対に立ち入らないようお願いいたします。
【別表】 実証実験の各社役割分担表
| 企業名 | 役割分担 |
| 【実証実験全体責任者】 東日本旅客鉄道株式会社 (以下「JR東日本」) | ・BRT専用道実験環境整備 |
| 【自動制御責任者:共同実験リーダー】 先進モビリティ株式会社 (以下「先進モビリティ」) | ・自動運転車両制御システム全般 ・車両側における障害物検知 |
| 【磁気マーカシステム責任者】 愛知製鋼株式会社 (以下「愛知製鋼」) | ・磁気マーカの敷設 ・磁気マーカシステム制御管理 |
| 【車内遠隔監視システム責任者】 SBドライブ株式会社 (以下「SBドライブ」) | ・車内モニタリングシステムの設置 ・遠隔監視システムの制御管理 |
| 【路車間通信責任者】 京セラ株式会社 (以下「京セラ」) | ・通信用路側機の設置 ・信号などの路車間通信管理 ・インフラ機器での障害物検知 |
| 【マルチホップ伝送システム責任者】 京セラコミュニケーションシステム 株式会社(以下「KCCS」) | ・マルチホップ伝送機器の設置 ・上記による自営無線網の通信管理 |
| 【車体管理者】 株式会社ジェイテクト (以下「ジェイテクト」) | ・車両の提供 ・ステアリング操舵システム機器の 設置 |
| 【マルチGNSS測量責任者】 ソフトバンク株式会社 (以下「ソフトバンク」) | ・GNSS受信機の設置 ・車両のRTK*測位など |
| 【信号装置敷設責任者】 日本信号株式会社 (以下「日本信号」) | ・交互通行区間信号制御および 信号情報提供 ・専用道入出路ゲート制御および 監視 |
| 【目標走行軌跡作成責任者】 日本電気株式会社(以下「NEC」) | ・自動運転車両の目標走行軌跡作成 ・磁気マーカシステム制御管理 |
*BRT…バス高速輸送システム(Bus Rapid Transit)
*GNSS…人工衛星を使用して地上の現在位置を計測する「衛星測位システム」のうち、全地球を測位対象とすることができるシステム。全地球測位システムともいう。(Global Navigation Satellite System)
*LTE…携帯電話の通信規格(Long Term Evolution)
*マルチホップ伝送…無線が届かない箇所にリレー方式でデータを中継し広い通信エリアをカバーする伝送方法
*QZSS(みちびき)…準天頂軌道の衛星が主体となり構成されている日本の衛星測位システム
(Quasi Zenith Satellite System)
*RTK…固定局と移動局の2つの受信機を利用し、リアルタイムに2点間で情報をやりとりすることで、高精度での測位を可能にする手法(Real Time Kinematic)