月面探査を競う宇宙開発レース「Google Lunar XPRIZE」 「ハクト」日本初の月面探査に一歩前進
~月面ミッションを模擬した実験を実施~
調査・報告
2013年9月27日 13:30民間企業による月面探査を競う国際宇宙開発レース「Google Lunar XPRIZE」に日本から唯一参加する、株式会社ispaceが運営するチーム「ハクト」は、2013年9月5日(木)に静岡県の中田島砂丘にて、月面で行うミッションを地上で模擬した公開実験を行いました。これによりチームが開発を進める月面探査ローバーが機能的に月面で行われるミッションを達成できることを証明するとともに、オペレーション上の問題点、改善点の洗い出しをおこなう事が出来ました。
 ハクト公開実験
ハクト公開実験月面では、今回の地球上の実験要素に加えて、地球の約6分の1しかない重力、宇宙放射線、そして約マイナス200度から最大約120度になる温度環境への対応が求められます。
ハクトは、今回の実験の成果を活かし、スポンサー企業を募りながら資金調達を進め、宇宙環境に適した機体の開発に取り組みます。ハクトは、2015年末に「本番」を迎える「Google Lunar XPRIZE」のミッション成功を目指します。
オフィシャルホームページ
http://team-hakuto.jp/
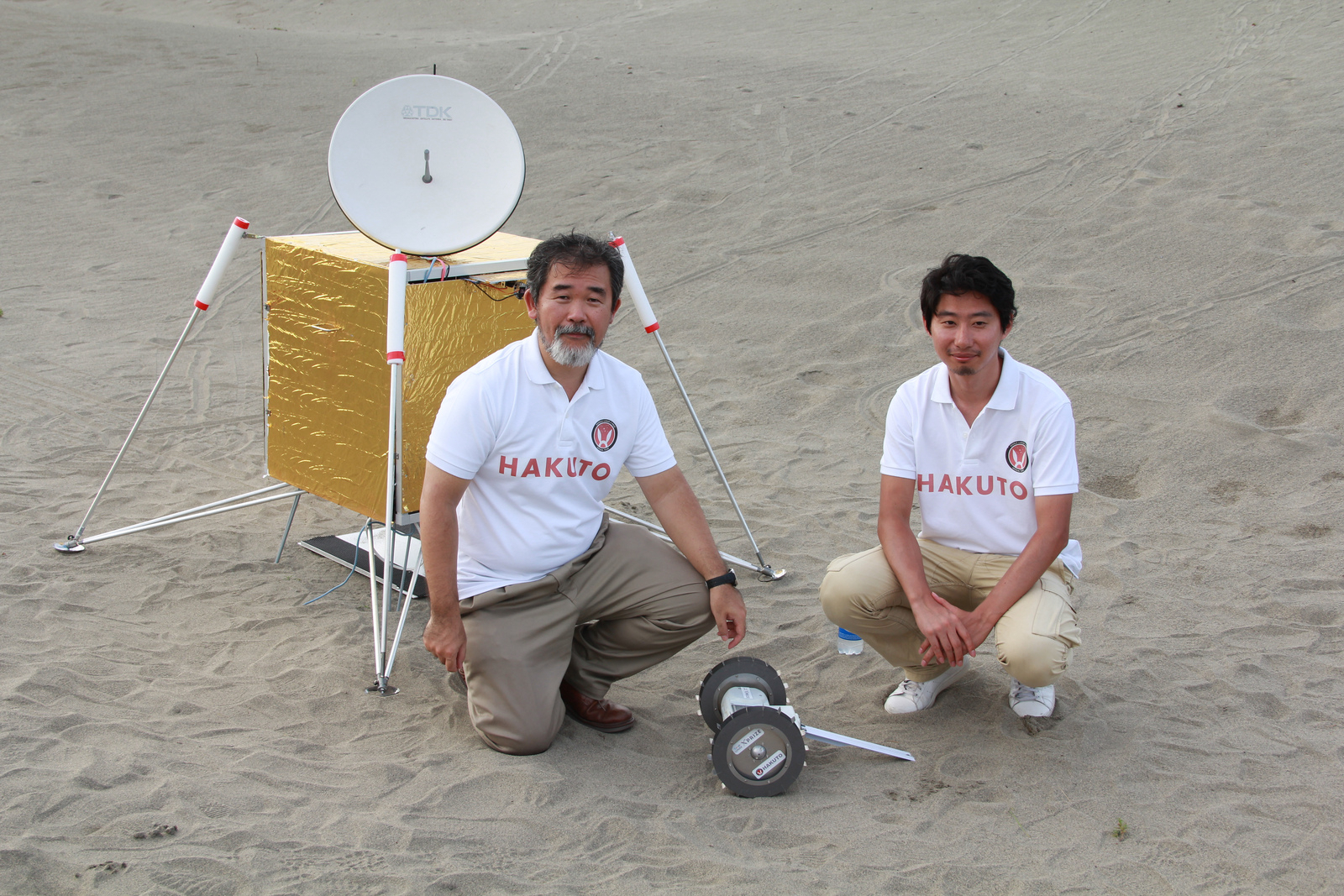
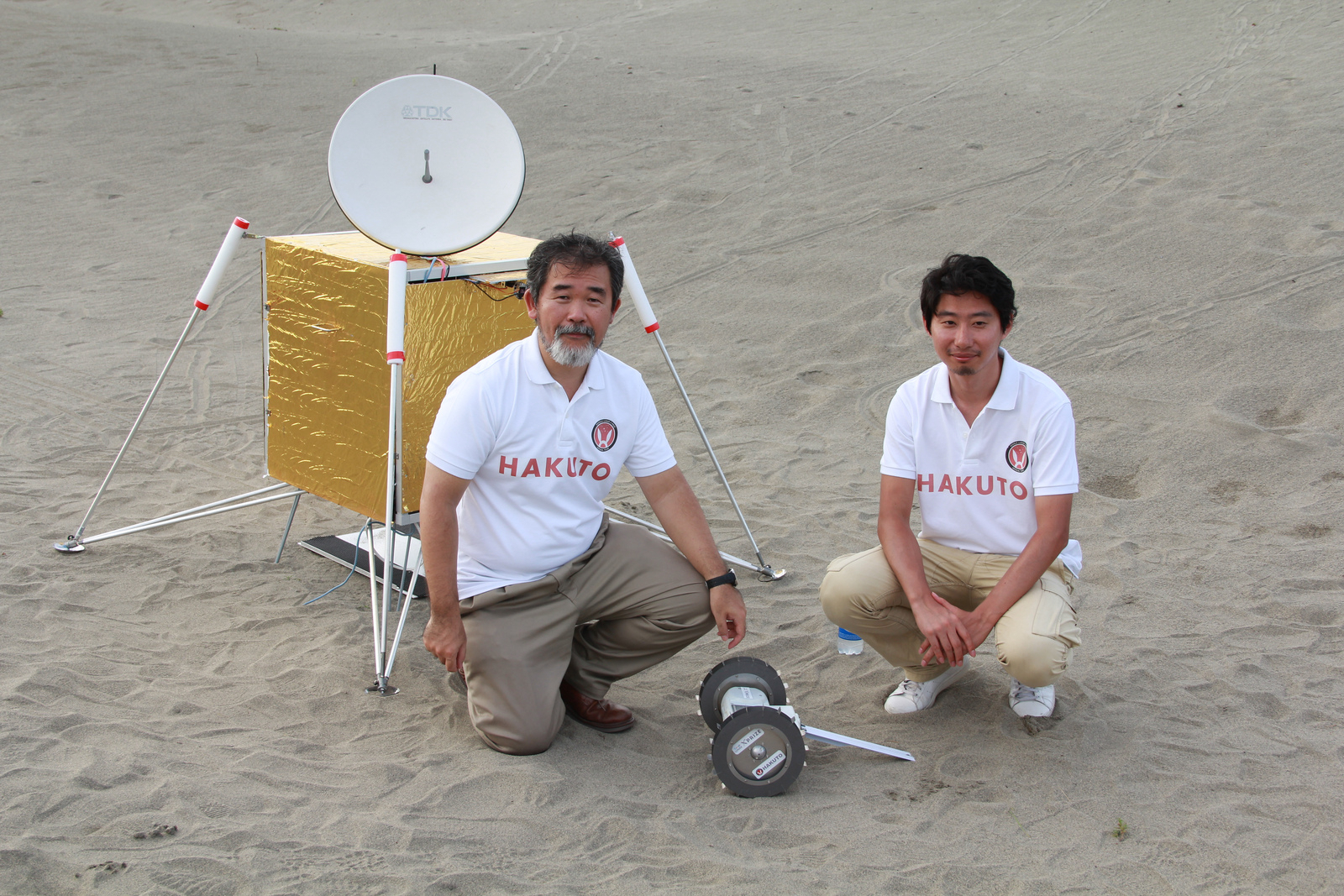
《ハクト公開実験にてチームリーダー袴田 武史とローバー開発リーダー吉田 和哉教授、ローバープロトタイプモデル3号機(PM-3)》
http://www.atpress.ne.jp/releases/39139/1_1.jpg
■今回行った実験について
月面で行う「Google Lunar XPRIZE」のミッションとは、月面を500メートル以上の移動、「ムーンキャスト」と呼ばれる高解像度の動画および写真などのデータの地上への送信の2つです。今回の実験では、月面地形に非常に似ていると言われている中田島砂丘を月面に見立て、開発した月面探査ローバープロトタイプモデル3号機で地上での模擬月面ミッションをおこないました。検証項目は大きく分けて以下の3点になります。
1. 500メートル走行
「Google Lunar XPRIZE」の要件である、500メートル以上走行する能力があることを実証する。ただし、500メートルは直線でなくともよい。
2. 動画取得
「Google Lunar XPRIZE」の要件である、ムーンキャストと呼ばれる静止画、HD動画、リアルタイム動画から成る映像パッケージを取得し、地球に見立てた地上局に送信できることを実証する。
3. 遠隔操縦
地球上から月面にあるローバーを操縦するには、ローバーから送られてくる画像などの限られた情報のみを頼りに操縦することになり難しくなる。また、通信の時間遅れが発生し、遠隔操縦はより一層難易度が高くなる。このような条件下で適切な遠隔操縦が行えることを実証する。
上記の項目を検証するにあたり実験方法の概略図は以下になります。
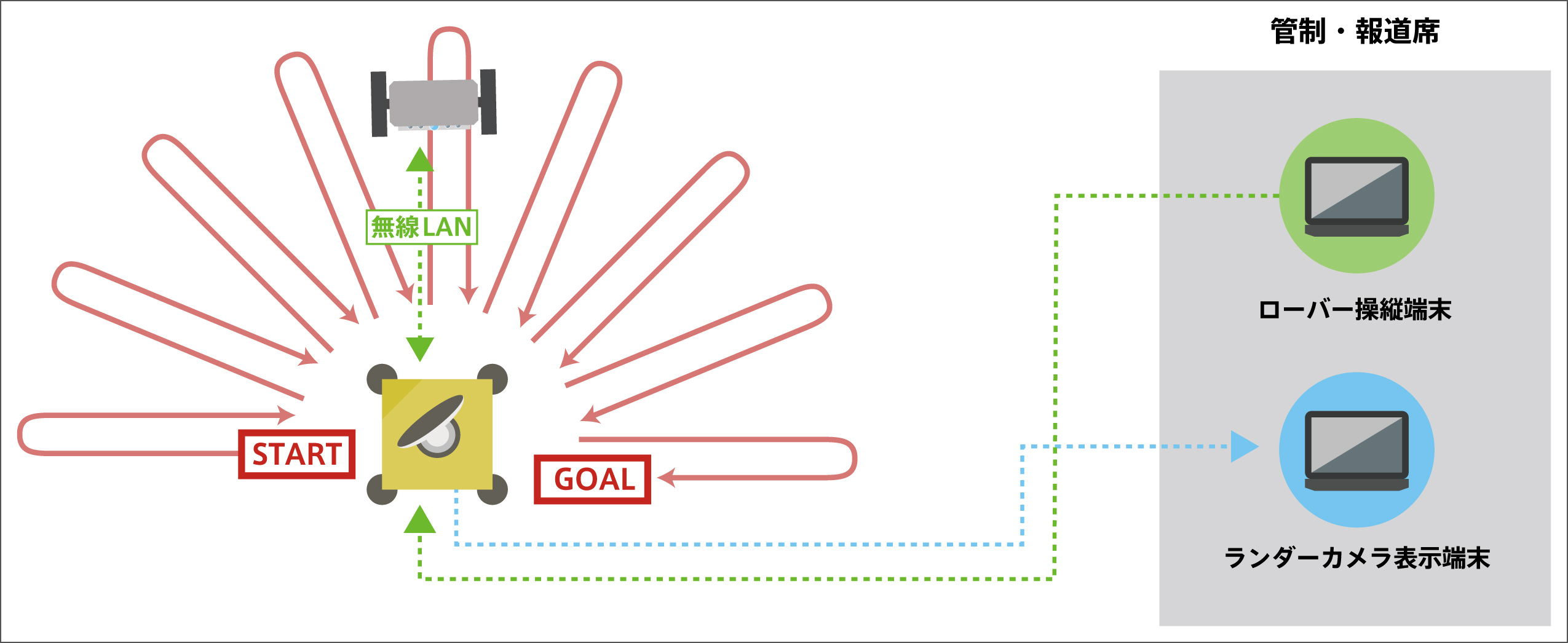
《公開実験概要図》
http://www.atpress.ne.jp/releases/39139/2_2.jpg
月面と地球の遠隔操縦を模擬するために、直接ローバーを見る事が出来ないように目隠しをしたテントからローバーを操縦し、基点(着陸船のモックアップ)から数十メートルのストロークを複数回往復走行する事で合計500メートルの走行をおこないます。また適宜ムーンキャストの撮影をおこないます。
■実験結果
実験を13時15分に開始し、18時40分に完了しました。
上記の3つの検証項目を実証できましたが、途中で技術的なトラブルにより2回の実験中断が発生したため、実験時間を当初の予定(3時間程度)より延長しました。
詳しくは以下のレポート記事と動画を参照ください。
《オフィシャルレポート記事》
http://team-hakuto.jp/?p=501
《オフィシャルレポート動画》
【Part 01】
http://youtu.be/0kmaSzJ7oM0
【Part 02】
http://youtu.be/EF2o8VdTMDI
■月面探査ローバープロトタイプモデル3号機の仕様と特徴
《ハクト月面探査ローバープロトタイプモデル3号機》
http://www.atpress.ne.jp/releases/39139/3_3.jpg
○主な仕様
限られた時間・予算の中で、「Google Lunar XPRIZE」ミッションを確実に達成するローバー
サイズ :W33cm × D48cm × H22cm
重量 :約2kg
最大走行速度 :10cm/s
登坂能力 :最大15度
静止画 :解像度1280×720pix
リアルタイム動画:解像度320×240pix、フレームレート10fps
HD動画 :解像度1280×720pix、フレームレート10fps
○主な特徴
1. 二輪駆動による大幅な軽量化の実現
2. 大きなホイール径と、グラウザー(爪)による走破性の向上
3. 上下反転しても走行可能な安定的形状
4. 安定した走行のためのスタビライザーの装着と、その形状の最適化
5. 3Dプリンタを用いた開発サイクルの高速化とRaspberry Piを活用した開発環境簡易化
○多くの支援を得ての開発
「PM-3」開発に当たっては、クラウドファンディングサービス「CAMPFIRE」で、250人を超える広く一般の方々から多くのご支援を頂き、そこで得られた総額230万円を超える資金を元に今回「PM-3」は製作されました。
■「Google Lunar XPRIZE」とは
「Google Lunar XPRIZE」は、Googleがスポンサーとなり、XPRIZE財団によって運営される、民間組織による月面無人探査を競う総額3,000万ドルの国際賞金レースです。ミッションは、2015年12月31日までに月面に純民間開発の無人探査機を着陸させ、着陸地点から500m以上移動し、指定された高解像度の動画や静止画データを地球に送信すること。世界10カ国以上から23チームが参加しています。
http://www.googlelunarxprize.org
■チーム「ハクト」について
「Google Lunar XPRIZE」に日本から唯一エントリーするチームで、株式会社ispaceが運営しています。小惑星探査機「はやぶさ」をはじめとして数々の宇宙機の開発に携わっている東北大学航空宇宙工学専攻の吉田 和哉教授を中心に月面探査ローバーの開発と、チームの広報活動を行っております。月への挑戦プロセスを開放し、今までの宇宙産業にないオープンな宇宙開発を実行しています。
http://team-hakuto.jp